Autonomous vehicles and robots are becoming increasingly common in our daily lives, from food delivery robots navigating residential sidewalks to self-driving cars navigating highways. However, ensuring the accuracy and reliability of the positioning information used in these applications is critical to autonomous or semi-autonomous applications. It involves knowing when to teleoperate a machine in the field or when to ask a human to take over control. This assurance or guarantee of a positioning solution is known as Integrity Monitoring.
Integrity monitoring verifies the accuracy and reliability of the sensor data, algorithms, and other components of the positioning system to ensure that the vehicle is operating safely and within the expected parameters. If the integrity monitor reports parameters that are out of range or results that exceed a defined protection level, the vehicle may be stopped or a teleoperator could take over. Even the best technology has errors, and this is where the integrity monitoring feature of Trusted Positioning’s AUTO software comes into play.
If a delivery robot is required to navigate residential sidewalks that average 36 to 48 inches wide, the robot’s navigation system will need to ensure that the system uncertainty of the positioning is well within the sidewalk lane and other parameters, such as the robot’s width. If the robot doesn’t have a properly designed integrity monitoring system, it may continue to navigate beyond the edge of the sidewalk and get stuck – not an uncommon scenario for today’s delivery robots!
Trusted Positioning’s AUTO positioning software features an integrity monitoring system that assesses its own accuracy and availability in combination with defined protection levels. AUTO can serve as either the primary positioning system or a secondary system, depending on the requirements of the vehicle or robot. It continuously evaluates its own accuracy and availability to ensure that the vehicle or robot is navigating safely and within the expected parameters.
The integrity monitoring system is designed to verify the trustworthiness of the solution. If the integrity monitoring system determines that the actual error exceeds the uncertainty plus a protection level set by the integrity system designer, it will instruct the robot not to rely on the system and will alert a teleoperator to take over navigation until more confidence is established from the positioning solution.
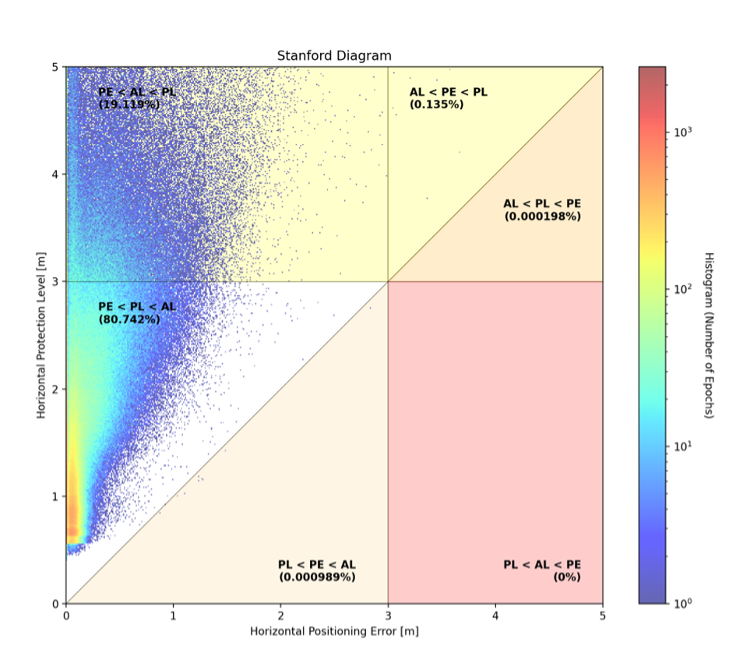
Integrity Monitoring can be displayed in a number of ways, but one of the most common is using a Stanford Diagram. The Stanford Diagram illustrates the availability of the solution under uncertain certain conditions based on a predefined protection level, also known as the alert level.
In the example data set below, the Alert Limit (AL) set by the system designer is 3.0m. Based on this Alert Limit, the AUTO positioning system is deemed trustworthy and available 80.7% of the time. The design of this system has been implemented to minimize hazardous operations to 0%, which is denoted by the bottom right section of the Stanford Diagram.
Trusted Positioning’s integrity monitoring system plays a critical role in ensuring the safety of autonomous vehicles and robots. By continuously assessing the level of our own accuracy and availability, we can ensure that the navigation system operates safely and within the expected limits. This enables the safe and efficient operation of autonomous vehicles and robots, as well as facilitating a secure handover to teleoperation teams.
In conclusion, integrity monitoring is a critical aspect of autonomous vehicle positioning systems. Without proper integrity monitoring, vehicles and robots would be at higher risk of accidents or other hazardous operations. Trusted Positioning’s AUTO positioning software includes an integrity monitoring feature that continuously assesses its own accuracy and availability to ensure that the positioning remains within expected parameters. With our integrity monitoring system, we can help ensure the safe and efficient operation of autonomous or semi-autonomous vehicles and robots.